Scanning Vehicles with Freestyle2

Overview
Best practices when using the Freestyle 2 to scan and capture the interior and exterior of vehicles using markers and merging the scans with SCENE.
Freestyle 2 Recommended Settings
- When scanning the exterior of the vehicle set the capture distance setting to 5m, use the background objects to help with tracking.
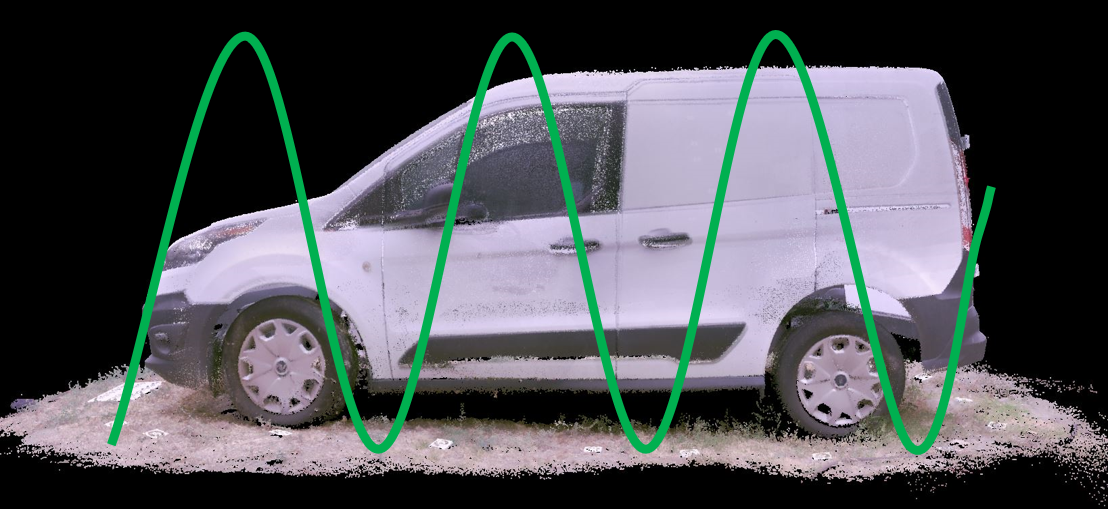
- Try to maintain a standoff distance from the vehicle of 1.5m to 2m when possible.
- When scanning the interior of the vehicle set the capture distance setting to 3m.
- Scan the markers and reference plate from a distance of 0.75m to 1m.
- Keep the flash on during the scans.
- Perform on-site compensation before the scan if the Freestyle 2 has been handled roughly or transitioned through a temperature differential.
- Run white balance.
- Process the files on a computer for best results.
Scanning the Exterior of the Vehicle
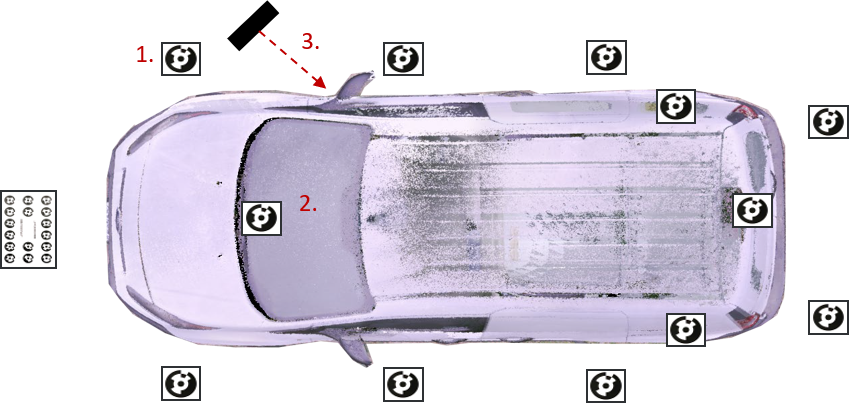
Start by scanning the exterior of the vehicle.
Make sure to start and end the scan on the reference plate.
|
 |
|
 |
Scanning the Interior of the Vehicle
|
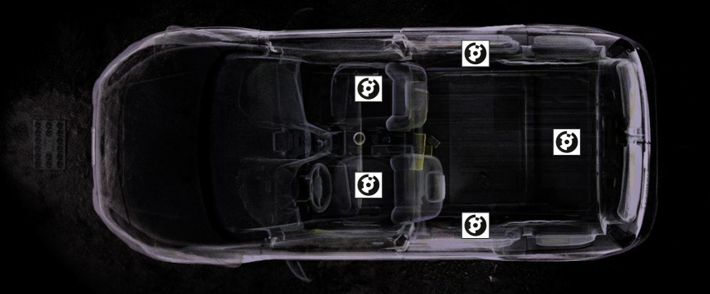 |
NOTE: Do not move the reference plate to the interior, markers are sufficient
|
Capture the passenger side:
|
 |
If possible close all the doors and scan from the inside with all the doors closed, capturing as many of the markers as possible per scan.
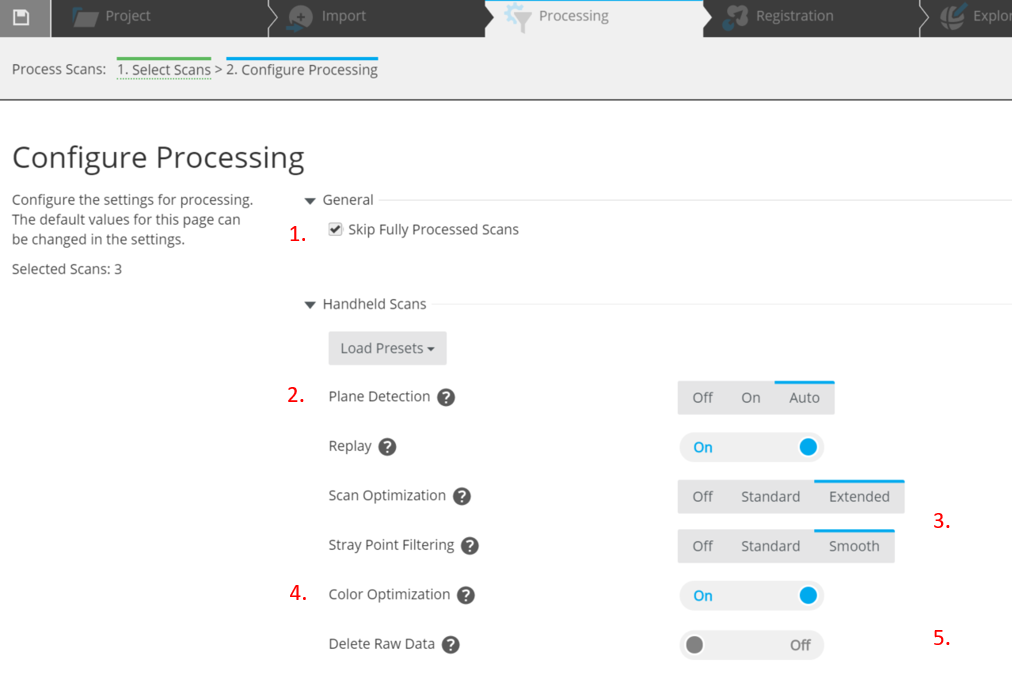
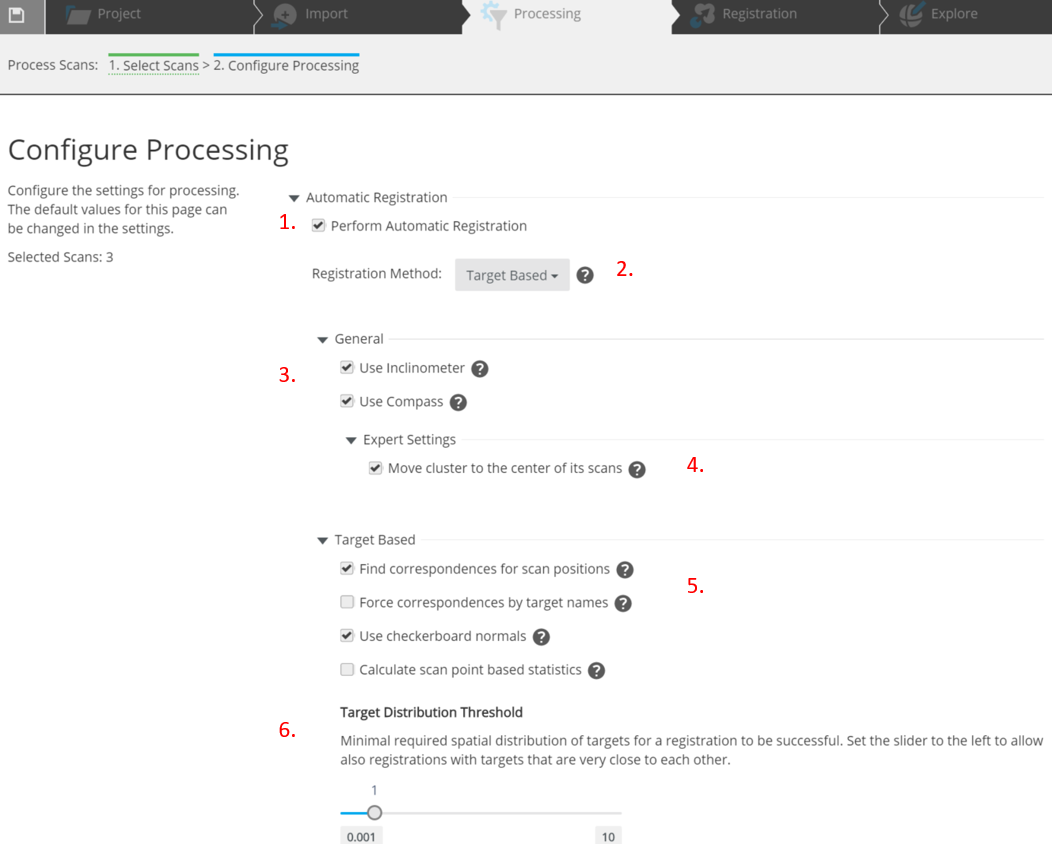
Processing Scans
When creating a new project, name the file the same as the project.
|
 |
|
 |