SCENE Registration Report App Information

Overview
Download and install the SCENE Registration Report app for a simple way to export SCENE registration reports. Save the report as a TXT, CSV, or XML file for processing or viewing.
Generating a Report
After installing the app, you can generate a report from within SCENE.
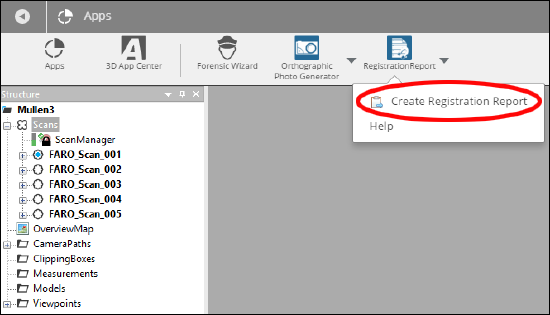
- Open the App ribbon.
- Click the Registration Report App icon.
- Click Create Registration Report.
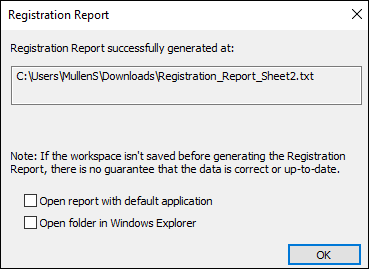
- Select a Name for the report, the destination folder, and the type of file to create.
- Optional: Check the box indicating program to use with the new file.
- Click OK.
General Information
The top of the report will contain general information about the project or scan cluster.
- Scan Quantity - The total number of participating scans
- Participating Scans - Scan names.
- Total _Correspondences - The total number of found correspondences
Individual Scan Information
The general information section is followed by specific information for each scan included in the registration report. These sections contain the following information if present.
- Scan Name - The name of the scan
- Inclinometer Usage – Indicates whether inclinometer readings have been used to level the scan during registration or not.
- Position [m] – The calculated position of the scan in global coordinates.
- Orientation Axis – The calculated rotation axis of the scan in global coordinates.
- Angle [°] – The calculated angle of rotation of the scan.
- Point Distance - The standard deviation of the distance between the local reference points and their corresponding references.
- Number of Correspondences – Total number of correspondences found between the references of the evaluated scan and the references in other scans.
- Correspondences – List of all reference pairs used for scan placement. The value Tension describes the discrepancy in the global coordinate system between the position and the orientation of the two corresponding reference objects in Scan 1 and Scan 2. For corresponding reference points, the distance between their positions serves as input for the calculation of the tension. For planes, slabs or pipes, the position and the direction serve as input for the calculation of this value. Values close to zero indicate a good registration result.
- Matched Objects – List of reference objects that correspond to the references in the currently evaluated scan.
- Target – The name of the corresponding reference object and its path in the workspace structure:
- In case there is a corresponding reference object in only one other scan, the displayed path is equivalent to the path of the corresponding object in this scan.
- In case there are corresponding references in more than one scan, the displayed object is treated as a “mean reference” (mean reference from several scans) and the displayed path of this “mean reference” is equivalent to the corresponding object of the currently evaluated scan.
- Distance [mm] – The distance between the reference of the currently evaluated scan and its corresponding reference.
- Longitudinal [mm] – The longitudinal distance between the reference of the currently evaluated scan and its corresponding reference.
- Angular [°] – The angular distance between the reference of the currently evaluated scan and its corresponding reference.
- Orthogonal [mm] – The orthogonal distance between the reference of the currently evaluated scan and its corresponding reference.
- Target – The name of the corresponding reference object and its path in the workspace structure:
Additional Information in the XML File
<Units> – This node exists below each <Scan> and <Matched_Objects> node. It specifies the unit for all distances and angles in the report.
See Also
Keywords:
App contains, registration report, content