Using the Moving Objects Filter in SCENE

Overview
The Moving Objects Filter automatically removes unwanted objects that moved through a scene while it was being scanned, such as people or vehicles. It makes it much faster for users to remove an object that shows up in one overlapping scan, but not the other, for registered scan projects. No extra time is needed scanning in the field.
Details
Scans must be processed and registered before using the moving object filter.
Note: Scans of areas containing mirrors, highly reflective objects, or windows, may contain stray scan points that are incorrect. Delete those scan points before running the filter.
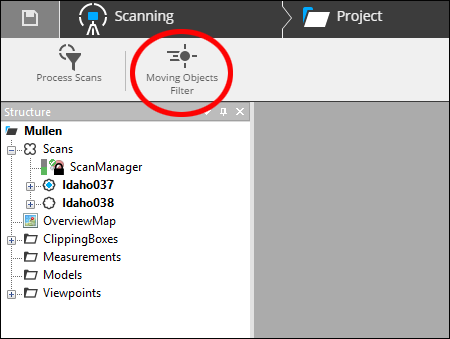
- To apply the filter, click Moving Objects Filter on the Processing ribbon.
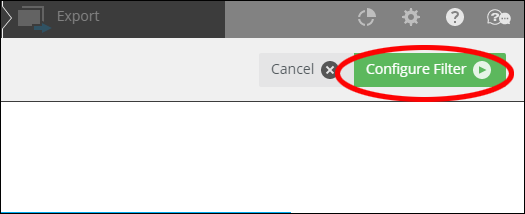
- Select the cluster of scans to be filtered and click Configure Filter at the top right of the screen.
- Configure the filter.
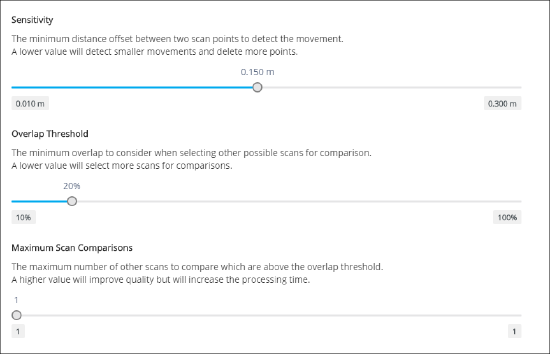
- Sensitivity - Use this to set the allowable offset between two scan points to be deleted. A lower value will detect smaller movements and delete more points.
- Overlap Threshold - This value determines how much scans must overlap to be used as a comparison. A lower value will increase the number of scans used for comparisons.
- Maximum Scan Comparisons - Sets the maximum number of scans to compare above the Overlap Threshold. Note: Using more scans will increase quality but will also increase processing time.
- Click Start Filter at the top right of the screen.
- Click OK when the filter has been applied.